

North finder can provide accurate heading information for the carrier and plays an important role in the military and civilian fields of national defense. The conventional methods to improve the accuracy of north seeker are mainly to select high precision gyro, improve the precision of rotation, increase the number of rotations, and eliminate external interference by digital filtering. Due to the limitation of working principle, technology and cost, the accuracy of the conventional elector-mechanical gyroscope is difficult to break through, and the resolution of the new fiber optic gyroscope is not satisfactory due to the influence of noise. Although the theodolite, gyro compass and rotary modulate north seeker can improve the north finding accuracy, the theodolite’s measuring time is long and expensive, the gyro compass is difficult to manufacture and debug, and the rotary modulate north seeker's structure is complex. These inherent characteristics limit its application range, so the static measuring north finder is still the main north finding means.
In order to improve the accuracy of the north seeker, the constant drift of the gyro can be suppressed by multi-position rotation. The common rotation methods include two-position method and four-position method, and three-position method can also be used for single-axis fiber optic gyroscope. The transposition mechanism can be driven by a stepper motor or a torque motor, and then the transposition position can be controlled by blocking the motor by mechanical limit or reading the position information by photoelectric encoder. In order to meet the requirement that north seeker can find the carrier correctly in pitch and tilt state, it can adjust the level of north finder platform before measurement and then find the north, or introduce an accelerometer to compensate by measuring the attitude Angle accurately. In this paper, the error characteristics of static measurement type north seeker are analyzed, and a comprehensive compensation scheme is proposed by establishing the FFT model of the system measurement error, which can effectively improve the north finding accuracy while maintaining the existing gyroscope accuracy, rotation accuracy and leveling accuracy.
1.Principle of north finder
Latitude is defined as φ, the value range is -90° ~ 90°, and the north latitude is positive; The north angle is represented by ψ, which ranges from 0° to 360° and is positive clockwise. The pitch angle is represented by θ, the value ranges from -90° to +90°, and the head is positive; The inclination angle is expressed by γ. The value ranges from -180° to + 180°. The right inclination is positive. The earth rotation rate is represented by ωie, and the local gravitational acceleration is represented by g, then the earth rotation rate component measured by north seeking device triaxially is [ωx,ωy,ωz], and the gravitational acceleration component is [ax,ay,az] T. The calculation formula is shown in equation (1) and equation (2)
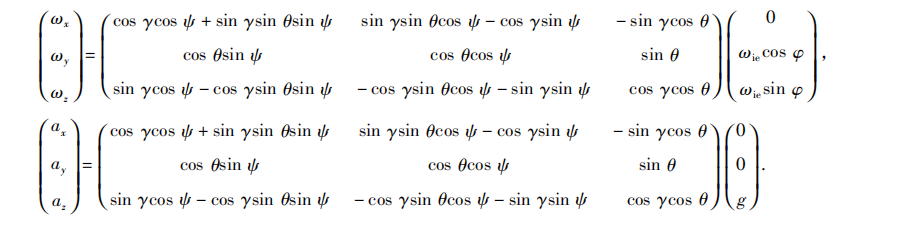

ax=-gsinγcosθ, ay=gsinθ, az=gcosγcosθ, then the north angle ψ is calculated as follows

If equation (4) is substituted into equation (5), the formula for calculating the north angle ψ directly expressed in acceleration is obtained

Formula (5) and formula (6) are the full attitude calculation formula of the north seeker with pitch angle and inclination angle. When seeking north in the horizontal state, γ=0 and θ=0, the formula is simplified to formula (7), and the north angle can be calculated without input of the local latitude.

It can be seen from formula (5) that the errors of north seeking device are mainly caused by angular rate measurement errors, attitude angle measurement errors, latitude errors and structural errors. When the gyroscope accuracy is certain, the angular rate measurement error can be reduced by the two-position measurement method, that is, after the initial position is measured, the gyroscope rotates 180° in the north seeking instrument and then measures again. The two measurement results are subtracted and divided by 2 to eliminate the constant drift error of the gyroscope.Neither the mechanical limit nor the encoder reading can strictly guarantee the 180° rotation accuracy, resulting in constant drift can not be completely suppressed, and there are still some residual constant drift.
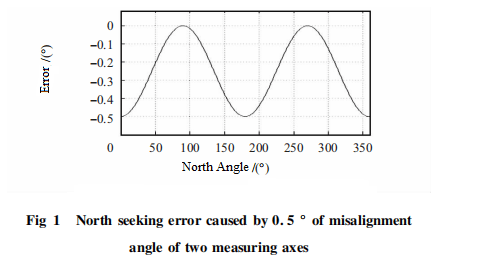
The attitude angle measurement error is mainly caused by the zero deviation repeatability of the accelerometer when the accelerometer is not rotated. When the angle measuring accelerometer and gyro are rotated together, the attitude angle measurement error is mainly caused by the zero bias residual of the accelerometer.When the latitude is exactly known, the latitude error can be ignored. The structural error includes not only the misalignment angle between the gyroscope and the accelerometer in north seeker, but also the misalignment angle between the gyroscope and the accelerometer, and the misalignment angle between the inertial element measurement reference and the external indicating mechanical reference of the north seeker. Due to the large number of processing procedures and material deformation, the influence of structural error is more significant in the high-precision north seeker produced in mass engineering. Suppose that the misalignment Angle between the gyro X axis pointing to the right side of the carrier and the gyro Y axis pointing to the head of the carrier is 0.5°(also referred to as the rotation error), and other errors are 0. The north seeking error characteristics of the north seeker in the whole week are shown in Figure 1.
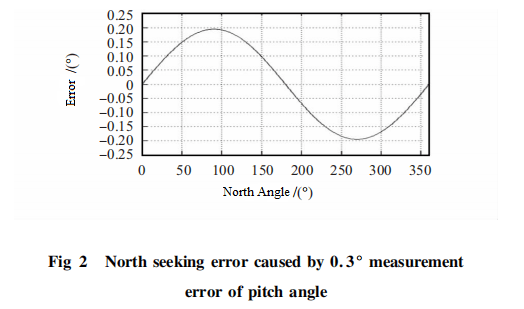
Suppose that the pitch angle measurement error caused by structural error or zero-bias residual of the accelerometer is 0.3°, and all other errors are 0°. The north seeking error characteristics of the north seeker in the whole week are shown in Figure 2.
2.Error modeling and compensation of the north finder based on FFT
The partial differential of each variable in the calculation formula of the north finder can quantitatively calculate the north seeking error coefficient of each item, but these coefficients are only of research significance under ideal circumstances. In actual production, because there are many factors affecting the north seeking accuracy, and many error parameters are difficult to measure accurately, it is impossible to compensate the error by multiplying the fixed coefficient by each parameter. Although the sources and forms of the factors causing the north finding error are different, it can be seen from formula (5) that they are all ultimately reflected in the trigonometric function combination of various variables. For each manufactured north finder, the deterministic error of its maximum component, such as structural error and constant residual of gyro accelerometer, is fixed, and these errors will eventually be reflected in the measurement error. If the north seeking error is decomposed and compensated by FFT, comprehensive compensation of each error can be completed at the system level without precise measurement of each component. It not only significantly improves the precision of north finding but also improves the working efficiency. One of the functions of FFT is to decompose periodic curves into superposition of harmonic components of trigonometric functions, as shown in formula (8).

After the debugging of the north finder, the north seeking error of each point can be obtained by installing an interval of 30° angle on the base platform for one week, and all errors can be FFT to obtain the constant term of FFT. These coefficients are put into formula (8) to calculate the compensation amount to complete the error compensation, and then the error data before and after compensation are measured again for one week. You can see that it's three times higher than the compensation requirement.
3.Conclusion
In a full-attitude static multi-position measuring north seeker, the constant residual of structural parameters and measuring components is fixed, so it is not necessary to accurately measure the error parameters of each sub-system, and the system-level FFT decomposition of the whole week's north seeking error and unified comprehensive compensation can significantly improve the north seeking accuracy, and the north seeking accuracy is increased by more than 3 times. It has good engineering significance. If you are interested in north seeker products, you can check out our north seeker ER-FNS-03,ER-MNS-05,ER-MNS-06.
More Technical Questions
1.Modeling and filtering in signals collected by FOG north seekers
2.Research and use of north finder for mining drilling rigs
3.System Analysis of MEMS North Seeker
4.How to Process the Data of FOG North Seeker
5.Research on Anti-environmental Interference of North Finder
6.Analysis and Calibration of North Seeker Transposition Error
Products in Article





