

A north finder is a type of compass, which is used to find the true north value of a location. Gyro north finder, also known as gyro compass, is an inertial measurement system that uses the principle of gyro to determine the projection direction of the earth's rotation angular rate on the local horizontal plane (ie true north). Its north-seeking process requires no external reference. In addition to being limited by high latitudes, its north-seeking measurements are not affected by weather, day and night time, geomagnetic field and site visibility conditions. A gyro north finder is a precision inertial measurement instrument that is commonly used to provide azimuth reference for oil drilling, geodetic surveying, and ground-based radar. According to the type of gyro used, gyro north finders can be divided into the following three types:
◆ North finder with two degrees of freedom gyroscope as the earth's rotation sensor (such as hanging pendulum gyroscope north finder)
◆ North finder with single-axis rate gyroscope as sensor (such as strapdown gyro north finder)
◆ Platform North Finding System
The gyro north finder is extremely sensitive to the vibration disturbance of the environment (especially to the low frequency vibration disturbance). According to the use environment, the gyro north finder can be divided into three types: high-precision north finder erected on the ground, vehicle-mounted gyro north finder and marine moving base gyro north finder.
The fiber optic gyro north finder is a high-precision inertial instrument that autonomously indicates the orientation. It can give the angle between the carrier and the true north direction without inputting the latitude value. Using the value of the earth's rotation angular rate measured by the fiber optic gyroscope and the angle between the gyroscope and the horizontal plane measured by the accelerometer, the angle between the baseline of the carrier and the true north direction can be obtained through computer calculation. The accelerometer placed on the baseline can Measure the attitude angle of the north finder. The fiber optic gyroscope used in the fiber optic gyroscope north finder is a solid-state device with no rotating parts, so it is resistant to shock and vibration. This is something that other non-fiber gyroscopes cannot do.
Principle of Fiber Optic Gyro North Seeker
ERICCO's Fiber Optic Gyroscope ER-FNS-01, ER-FNS-02, ER-FNS-03 (Fiber Optic Gyroscope, FOG) is a new all-solid-state gyroscope based on the Sagnac effect, an inertial measurement element without mechanical rotating parts , has the advantages of shock resistance, high sensitivity, long life, low power consumption, and reliable integration. It is an ideal inertial device in a new generation of strapdown inertial navigation systems.
In the north-finding application based on fiber optic gyroscope, most of the methods used are to rotate the FOG by a fixed angle, and calculate the angle relative to the north direction by determining the offset. In order to point north accurately, the drift of the FOG must also be eliminated. Generally, a rotating platform is used as shown in Figure 1, and the fiber optic gyroscope is placed on the moving base, the plane of the moving base is parallel to the horizontal plane, and the sensitive axis of the fiber optic gyro is parallel to the plane of the moving base. When starting to seek north, the gyro is in position 1 and the gyro sensitive axis is parallel to the carrier. It is assumed that the angle between the initial direction of the FOG sensitive axis and the direction of true north is α. The output value of the gyro at position 1 is ω1; then the base is rotated 90°, and the output value of the gyro measured at position 2 is ω2. Rotate 90° twice in turn, and turn to positions 3 and 4, respectively, to obtain angular velocities ω3 and ω4.

Figure 1
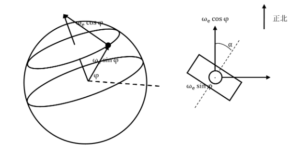
Figure 2
The heading angle can be calculated through ω1, ω2, ω3, and ω4. Using this method to measure, the zero offset of the gyro can be eliminated, and the latitude value of the measurement location is not required. If the latitude of the measurement location is known, the heading angle can be obtained by simply measuring two positions 1 and 3 (or 2 and 4).
More Technical Questions
1.Fiber Optic Gyro North Seeker
2.Dynamic Fiber Optic Gyro North Seeker
3.Function of Fiber Optic Gyroscope North Seeker
4.Fiber Optic Gyro North Seeker
5.High Precision FOG North Seeker
6.High Performance Dynamic FOG North Seeker
Products in Article





