

The disadvantage of the traditional north seeker is the size and shape of the device, as well as the influence of the surrounding environment. Inertial navigation systems are based on inertial devices such as accelerometers, which are sensitive to linear acceleration, and gyroscopes, which are used to measure the angular velocity of objects. Inertial navigation is an autonomous type of navigation that is not affected by the external environment.
The development of high precision gyroscope and the improvement of gyroscope technology have introduced a new type of gyroscopic north seeker with higher precision, high speed response and more reliability than in difficult environments. Inertial navigation system is in an irreplaceable position, because it has a unique autonomous working ability, even if the GPS satellite navigation positioning system will have a challenge to the inertial navigation system. Gyroscopic north finding technology has become a key technology in modern weapon systems. Therefore, the research of gyroscopic north finding method has important application value in modern military and civil fields.
This paper intends to discuss with you the design and research of the structure of the high-precision miniaturized north seeker. The gyro north finder to be studied needs to be installed in a limited space and in a special environment of shock vibration. In the whole work need to take into account the impact vibration, so in the structural design to achieve high strength, high rigidity, light weight. Therefore, accurate positioning and compact construction are required, so the requirements for shape size, specific structural design and quality are very strict.
1.Strapdown inertial navigation system
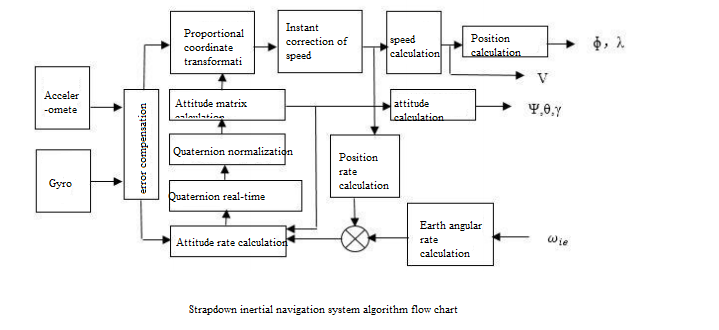
Inertial navigation system according to the inertial navigation combination according to the installation form can be divided into strapdown and table, Ericco company's north finder products are strapdown. Strapdown system small size, architecture. The principle diagram of the strapdown inertial navigation system is shown in Figure 1. The accelerometer combination and gyroscope combination are installed on the body. The angular velocity of the navigation coordinate system is obtained from the difference between the acceleration of the gyroscopic combination and the angular velocity of the coordinate system's inertial space, and this information is used to calculate the attitude matrix. The acceleration information in the accelerometer combination is converted to the proportional coordinate system for navigation solution. The heading and attitude information are obtained by solving in the attitude matrix. The function of inertial navigation system platform can be replaced by the calculation of attitude matrix, the conversion of acceleration information, the calculation of heading and attitude. The algorithm flow of the strapdown inertial navigation system is shown in Figure 2.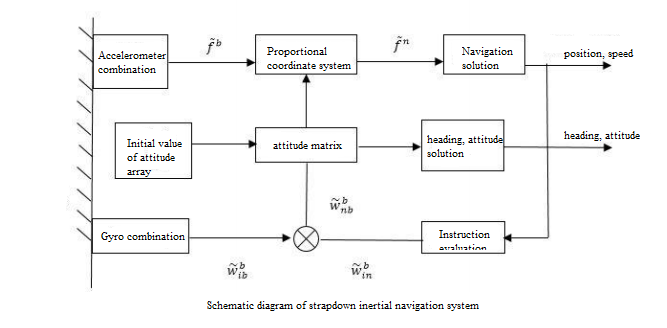
2.North seekerstructure scheme
The gyroscopic north seeker can provide heading information to the moving body in full autonomy, and its work does not rely on satellites, is not affected by climate, and does not require complex operations. Gyro north finder not only provides data output interface for computer, but also provides a good man-machine interface. The north finder is mainly composed of inertial measurement module (IMU) and line part, and the hardware block diagram is shown in Figure 3.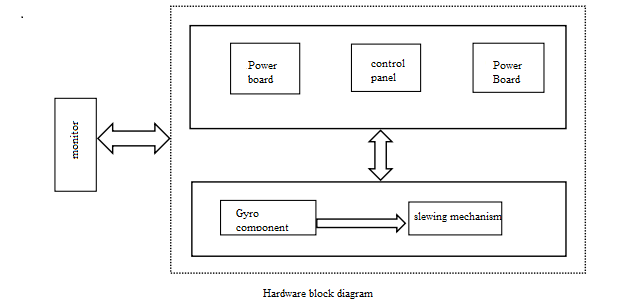
As a precise positioning device, gyro north finder's working accuracy and reliability directly affect the positioning accuracy of the whole machine. The structural characteristics of IMU directly affect the working accuracy and reliability of the whole system. IMU is an important part of gyro north finder. Gyroscope accelerometer and other high-precision inertial measurement instruments are installed on it. Together with bearings, torque motors and rotary transformers installed in IMU, they constitute inertial measurement components. Therefore, it is an indispensable process to analyze the design of gyro north finder and rotary IMU.
3.structural index requirements
1.Structure form: integrated structure;
2.Output mode: serial output;
3.Weight: ≤2KG;
4.Overall dimensions (L × W × H, excluding panel and electrical connector dimensions) : 200mm×100mm×90mm
5.Working environment requirement
(1) Vibration: test type: sinusoidal scan vibration test and screening vibration;
(2) Impact: Impact category: half sinusoidal pulse;
Peak acceleration: 20g;
Pulse width: 8-11ms;
During the process of transportation, storage and operation, north finder may be affected by sinusoidal vibration, random vibration and shock due to the complex and changeable environmental factors. In order to ensure the normal operation of north finder in the complex and changeable environment, the environmental adaptability of gyro north finder structure must be strong. The deformation and stress of gyro north finder should meet the requirements of use.
Summary
The above is the research of Ericco's north seeker ER-FNS-03. In view of the more and more sophisticated structure design of north finder, Ericco company based on MEMS technology developed cost-effective north seeker ER-MNS-05 and the world's smallest size north seeker ER-MNS-06, small in size, but functional, wide range of applications, welcome to learn the details.
More Technical Questions
1.Technical analysis of MEMS direction alignment instrument for mining
2.Research on downhole north seeker
3.Research on orthogonal monitoring technology of north finder
4.Modeling and filtering in signals collected by FOG north seekers
5.Error Modeling and Compensation Analysis of North Finder Based on FFT
6.Research and use of north finder for mining drilling rigs
Products in Article





