

The performance index of a gyro north-seeking device depends on two aspects: north-seeking precision and north-seeking time. The traditional north-seeking device has a good performance in north seeking performance, but its equipment is expensive and heavy. With the continuous optimization of the performance and accuracy of MEMS gyroscope, the future gyro north-seeking device will develop towards the trend of high north-seeking accuracy, low north-seeking time, low cost, small size and high operational flexibility. MEMS IMU has been widely used in general civil navigation, tactical weapons and unmanned systems because of its advantages of small size, low cost, high reliability and easy installation.
IMU in inertial navigation system
The inertial navigation system is an auxiliary navigation system that uses accelerometers and gyroscopes to measure the acceleration and angular velocity of objects and uses computers to continuously estimate the attitude, speed and position of objects through navigation solutions. Inertial navigation system is an inseparable system in the modern navigation field.
According to the physical platform, the inertial navigation system can be divided into platform inertial navigation system and strapdown inertial navigation system.
The advantages of the platform inertial navigation system are that the computing burden of the computer is light, and the dynamic range of the gyro in the platform inertial navigation system can be small because the rotation of the navigation coordinate system is very slow. Its disadvantages are also obvious: complex structure, large size, heavy weight, and poor reliability.
With the development of gyro technology and the improvement of computer ability, strapdown inertial navigation system (Strapdown inertial navigation system) has gradually replaced the platform inertial navigation system (INS) in some fields and become a research hotspot in modern times. The characteristic of the strapdown inertial navigation system is that the navigation coordinate system is established by algorithm, that is, the mathematical platform replaces the physical platform, which makes the system simple in structure, small in size, easy to maintain and high in reliability. The attitude update solution is the key algorithm of the strapdown inertial navigation system, and the strapdown inertial navigation system uses IMU to obtain the carrier information for the attitude solution.
Inertial Measurement Unit (IMU) is a device used to measure the three-axis angular velocity and acceleration of a carrier. Generally, a gyroscope and accelerometer are installed on the orthogonal three axes of an IMU, with a total of 6 degrees of freedom, to measure the angular velocity and acceleration of the carrier in three-dimensional space, and then the strapdown inertial navigation system can calculate the attitude of the carrier.
Integration of MEMS technology and inertial devices
As the core sensor of the inertial navigation system, the development of inertial devices (gyroscope and accelerometer) plays an important role in the development of the inertial navigation system. According to the working principle, the early gyroscopes are mainly rotor gyro, according to the different support types of liquid float gyro, dynamic tuning gyro, electrostatic gyro and maglev gyro, etc. After the 1970s, laser gyro and fiber optic gyro based on the optical Sagnac effect appeared.
From the aspect of gyroscope accuracy (bias stability) statistics, electrostatic gyro precision is the highest, can reach 10-6 °/h, the precision level of dynamic tuning gyro is about 0.01°/h, laser gyro precision level is about 0.01~0.001°/h level, compared with laser gyro, fiber optic gyro smaller volume, low power consumption, and low price. Although the precision is not as good as laser gyro, but with the continuous improvement of optical fiber manufacturing technology, its potential advantage is more obvious.

MEMS is an industrial technology that merges microelectronics and mechanical engineering with a range of operations on the micron scale. Along with the improvement of the silicon semiconductor process for making integrated circuits, the micromechanical manufacturing technology of micro-machinery, micro-sensor and micro-actuator emerged in the 1980s, making MEMS technology become a real product. The achievements of MEMS technology in the field of inertial navigation are reflected in the MEMS IMU, which is composed of three silicon micro gyroscopes, three silicon micro accelerometers and the corresponding control circuit. MEMS IMU has the advantages of small size, light weight, easy mass production and low cost, and has been widely used in the general civil and some unmanned system navigation fields. But its disadvantages are obvious: relatively low accuracy, bias stability is about 10~20°/h.
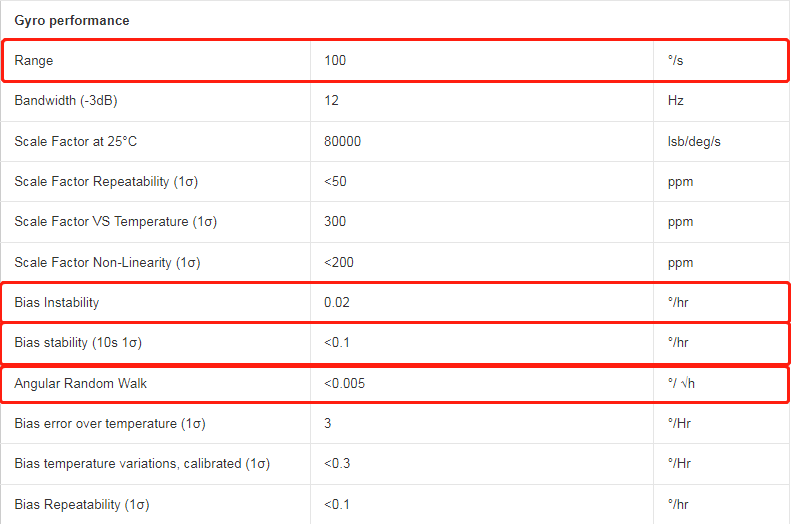
But Ericco's ER-MIMU-01&ER-MIMU-05 use High Performance North Seeking MEMS Gyroscope(ER-MG2-100) that can reach 0.1°/h. The accuracy is more accurate than the lowest-precision IMUs of many large companies, and It can reflect its high performance in complex environments.
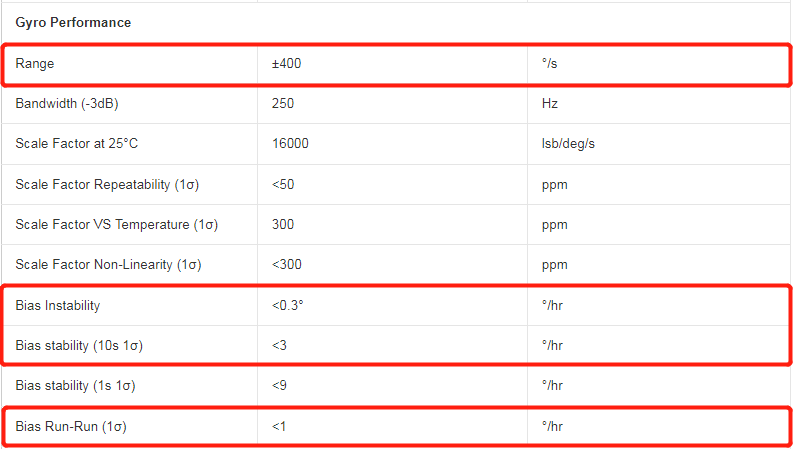
Even ER-MIMU-03&ER-MIMU-07, its bias stability is only 3°/h, which can be used in the stable control system.
If you would like more information about the Ericco MEMS IMU, please feel free to contact us: info@ericcointernational.com
More Technical Questions
2.Application of MEMS IMU in Automobile
3.IMU Based on MEMS Technology
4.The Difference Between Gyroscope, Compass, IMU, MEMS
5.IMU in Drones (MEMS triaxial accelerometer, triaxial gyroscope, triaxial magnetometer)
Products in Article





