

1.Working principle of inertial north seeker
The working principle of the inertial north seeker is to measure the angular velocity of the earth's rotation by using a gyroscope, and then calculate the angle between the north and the measured direction. Suppose that the latitude of S at the location of a carrier in the northern hemisphere is φ, and the angular velocity vector Ω of the earth rotation at that point has a horizontal northward component of Ωx0 and a vertical upward component of Ωz0, then there is
![]()
Assuming that the carrier is completely horizontal and the angle between it and true north is H, the component of on the sensitive axis of the north seeker gyro, that is, the gyro measurement value, is:
![]()
And because and are known, the azimuth angle can be calculated in this way, that is, the output value of the north seeker under the ideal condition of absolute horizontal carrier and no installation error. In practice, carrier attitude Angle error and gyro installation error will affect gyro measurement value and result in lower measurement accuracy of north finder.
2.Carrier attitude angle error analysis
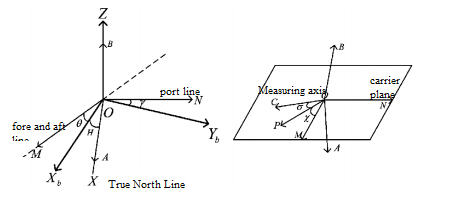
Define the geospatial coordinate system O-XYZ: the center of mass of the carrier is O, the X-axis goes north along the local meridian, the Y-axis goes west along the local latitude, and the Z-axis is perpendicular to the local horizontal plane upward; the planes XOY, YOZ, and XOZ are perpendicular to each other. , dividing the space into eight hexagrams.
For the convenience of analysis, it is assumed that the gyro center of the north seeker coincides with the center of mass of the carrier. When the installation error is not considered, the measuring axis of the gyroscope of the north finder coincides with the head and tail lines of the carrier. The unit vector OM is located ON the sensitive axis of the gyroscope, which is forward along the head and tail lines of the carrier, and the other unit vector ON is perpendicular to OM to the left. The carrier attitude error Angle is defined as follows: the pitch error Angle is the Angle between OM and OXb (OM projection on the horizontal plane), and the front of the carrier is raised positively; The roll error Angle is the Angle between ON and OYb (the intersection line between the carrier profile and the horizontal plane over ON), and the left side of the carrier is positive when lifted. The Angle between OX and OXb is the azimuth Angle H. The following vertical relationship is easily obtained: OYb⊥OXb ⊥OZ, OYb⊥OZ, OXb⊥ oz, that is, the planes XbOYb, XbOZ and YbOZ are perpendicular to each other. These three planes can form the carrier space coordinate system O-XbYbZ, as shown in Figure 1, which can be understood to be formed by the geographical space coordinate system O-XYZ turning the azimuth angle H clockwise.
The horizontal component and vertical component of the earth rotation angular velocity at the point where the carrier is located are vectors OA and OB respectively, then the coordinates of point A and point B are in the O-XbYbZ coordinate system. M coordinates and N coordinates are obtained by space analytic geometry. Since the three points M, O and N are all on the carrier plane, the plane MON equation can be obtained according to the point method expression of the plane:
![]()
The measured gyro value of the north seeker is the sum of the projected values of OA and OB on the sensitive axis OM, as shown in Formula:
![]()
This formula is converted to an ideal expression of the measured value when θ =0°. gyro measurement error:
![]()
It can be seen that the error of the gyro measurement value at this time is related to the pitch error Angle, azimuth angle H and latitude, and the roll error angle is generated by the rotation of the carrier plane around the head and tail lines, that is, the sensitive axis OM, so the error angle has no influence on the measured value MOM on OM.
3.Summary
There will be a lot of error sources in the process of north seeker, in terms of error compensation, Ericco company has been pursuing more mature technology and more cost-effective inertial devices. In the new MEMS north finder for mining drilling ER-MNS-09, attitude compensation function is added, as well as cost-effective north finder ER-MNS-05 and the world's smallest MEMS three-axis north finder ER-MNS-06, waiting for you to understand.
More Technical Questions
1.Effective combination of north finder and spacecraft based on autonomous orientation
2.Research on downhole north seeker
3.Research on orthogonal monitoring technology of north finder
4.Modeling and filtering in signals collected by FOG north seekers
5.Error Modeling and Compensation Analysis of North Finder Based on FFT
6.Research and use of north finder for mining drilling rigs
Products in Article
 MEMS Triaxial North Seeker for Mining
MEMS Triaxial North Seeker for Mining

 Low Cost 3 Axis FOG North Seeker
Low Cost 3 Axis FOG North Seeker
