


{kind=link}
{kind=link}
ER-MNS-10AD MEMS North Seeker for Hydraulic Supports in Underground Coal Mines
Introduction
ER-MNS-10AD MEMS North Seeker is a special north seeker for hydraulic supports in coal mines. It adopts the latest MEMS gyro technology, with a height of only 14mm and a total product weight of 40g. It has the world's thinnest and lightest disruptive design, breaking through the volume and weight limitations of traditional equipment. The flat structure can be easily applied to various occasions with strict requirements on height and weight.
Using the latest three-axis MEMS gyro and three-axis MEMS accelerometer strapdown inertial measurement technology, the angular velocity and acceleration are solved to achieve fast and stable measurement of attitude control and true north reference.
It has excellent temperature adaptability and supports compensation in a wide temperature range of 5°C to 55°C. Stable output in different working environments..
Features
- Adopting the latest MEMS gyro technology, it is the thinnest and lightest north seeker, with a thickness of only 14mm and a weight of 40g, suitable for installation in narrow spaces;
- Adopting the latest three-axis MEMS gyro and three-axis MEMS accelerometerstrapdown inertial measurement technology;
- With self-seeking function;
- Not affected by magnetic field;
- Temperature compensation from 5°C to 55°C;
- High quality and low power consumption;
Applications
Hydraulic support in coal mines
Precision platform attitude measurement and control
Static initial alignment and direction control of drones, vehicles, etc.
Directional pointing and tracking in satellite antennas and target tracking systems
North seeking in geodetic/land mobile mapping systems
Pointing, steering and guiding in advanced mining/drilling equipment
Specifications
| Model No. | ER-MNS-10AD |
| Heading accuracy (1σ,°secψ) | 1 |
| Attitude accuracy(1σ,°) | ≤0.3 |
| Heading accuracy retaining time | 20min |
| Attitude accuracy retaining time | 20min |
| Heading measurement range(°) | 0~360 |
| Inclination angle measurement range(°) | -85~85 |
| North seeking time | 180s |
| North seeking method | stationary |
| Update Rate (Hz) | 100 |
| Use the environment and electrical interfaces | |
| Operating temperature (℃) | 5~+55 |
| Storage temperature (℃) | 0~+65 |
| Power supply (V) | 6~12V DC |
| Power (W) | 2 |
| Communication interface | RS-422 |
| Physical characteristics | |
| Size (mm×mm×mm) | 47×44×14 |
| Weight (g) | 40 |
Wiring Definition
The product docking connector is Samtec CLM-112-02-L-D
| Connect Type | pin | definition |
|
mw-12-03-g-d-130-112
|
10、11、12 | +6~12V |
| 13、14、15 | GND | |
| 23 | Tx+ | |
| 24 | Tx- | |
| 21 | Rx+ | |
| 22 | Rx- |
Dimension

Data protocols
Upper computer receiving protocol
The data update rate is 100Hz, the baud rate is 230400bps, and each frame contains 61 bytes of data, each byte contains 1 start bit (0), 8 data bits, 1 stop bit (1), and no parity. The specific data format is shown in the table below:
Table 1 Receive data frame format
| Bytes (60 bytes total) | Data content | supplementary note |
| 1~4 | header | EB8055AA |
| 5~8 | X Gyro Data | Low then high, dimensionless digital FLOAT |
| 9~12 | Y gyro data | Low then high, dimensionless digital FLOAT |
| 13~16 | Z Gyro Data | Low then high, dimensionless digital FLOAT |
| 17~20 | X ACCL data | Low then high, dimensionless digital FLOAT |
| 21~24 | Y ACCL data | Low then high, dimensionless digital FLOAT |
| 25~28 | Z ACCL data | Low then high, dimensionless digital FLOAT |
| 29~32 | Lon | Low then high, 0.000001°. |
| 33~36 | Lat | Low then high, 0.000001°. |
| 37~40 | Alt | First low, then high, 0.000001m |
| 41~44 | count | Low then high, 10ms |
| 45~46 | pit | Low then high, 0.01° |
| 47~48 | rol | Low then high, 0.01° |
| 49~50 | yaw | Low then high, 0.01° |
| 51~52 | North speed | First low then high, 0.01m/s |
| 53~54 | up speed | First low then high, 0.01m/s |
| 55~56 | east speed | First low then high, 0.01m/s |
| 57 | state | 0xA1 alignment, 0xB1 hold |
| 58 | end of frame | 0x00 |
| 59 | end of frame | 0xFF |
| 60 | end of frame | 0x34 |
| 61 | matching test | EB 80 and the sum of all bytes other than itself |
Host computer sending protocol
Total number of bytes sent down in a single transmission: 21 bytes, baud rate 230400bps, no parity, each byte includes: start bit (0), data bit (8 bits), stop bit (1).
- priming
| byte symbol | define | note |
| 1 | 0xEB | |
| 2 | 0x80 | |
| 3 | 0x00 | |
| 4 | 0xCC | |
| 5-8 | 0x00 | |
| 9-12 | 0x00 | |
| 13-16 | 0x00 | |
| 17-21 | 0x00 |
- Send warp and woof height
| byte symbol | define | note |
| 1 | 0xEB | |
| 2 | 0x80 | |
| 3 | 0x00 | |
| 4 | 0xAA | |
| 5-8 | lon | |
| 9-12 | lat | |
| 13-16 | alt | |
| 17 | 0xAA | |
| 18 | 0xBB | |
| 19 | 0xCC | |
| 20 | 0xDD | |
| 21 | 5~20 heterodyne calibration |
Determine the definition of the data sent based on byte 4:
- if control_flag==0xCC: restart work
- if control_flag==0xAA: send latitude/longitude altitude
Send order: 5-8 bytes: latitude (*1e6 in °)
9-12 bytes: longitude (*1e6 in °)
13-16 bytes: height (*1 in m)
For example, the C code that sends the latitude/longitude instruction (the rest of the bytes are configured arbitrarily), Latitude is "latitude * 1e6", longitude is similar, and altitude scale is 1.
bytSend[0] = 0xeb;
bytSend[1] = 0x80;
bytSend[2] = 0x00;
bytSend[3] = 0xaa;
bytSend[4] = (Latitude>>24) & 0xff;
bytSend[5] = (Latitude>>16) & 0xff;
bytSend[6] = (Latitude>>8) & 0xff;
bytSend[7] = (Latitude) & 0xff.
bytSend[8] = (Longitude>>24) & 0xff;
bytSend[9] = (Longitude>>16) & 0xff;
bytSend[10] = (Longitude>>8) & 0xff;
bytSend[11] = (Longitude) & 0xff.
bytSend[12] = (Height>>24) & 0xff;
bytSend[13] = (Height>>16) & 0xff;
bytSend[14] = (Height>>8) & 0xff;
bytSend[15] = (Height) & 0xff;
bytSend[16] = 0xaa;
bytSend[17] = 0xbb;
bytSend[18] = 0xcc;
bytSend[19] = 0xdd;
bytSend[20] = b[4]^b[5]^... .b[19];
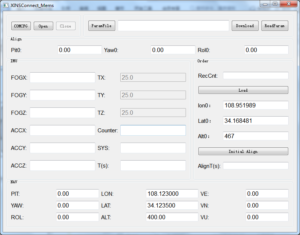
Introduction to the software
Click the COMCFG button to set the serial port, baud rate and frequency. The baud rate is 230400 and the frequency CAL is 100HZ.
Click Open to start the test.
Click Initial Align to start the north search, the search time is 300s.The result is displayed at PIT;YAW;ROL.
If you want to change the latitude and longitude, please change them at Lon0 and Lat0, then click Load, and then click Initial Align to re-navigate.
Application Techniques
1.Applicable to coal mines, tunnels, and exploration! North seeker's strength revealed
2.How important is the North Seeker in the field of oil、mining and drilling?
4.Efficient mining, north seeker assists mining drilling operations
5.Accurate orientation, easy to deal with! North seeker helps work more efficiently
More Products
 Ultra-small Size OEM MEMS North Seeker
Ultra-small Size OEM MEMS North Seeker Smallest Volume MEMS North Seeker
Smallest Volume MEMS North Seeker
 High Performance North Seeking MEMS Gyroscope
High Performance North Seeking MEMS Gyroscope High Accuracy MEMS Accelerometer
High Accuracy MEMS Accelerometer Low Cost 3 Axis FOG North Seeker
Low Cost 3 Axis FOG North Seeker