


{kind=link}
{kind=link}
ER-MNS-18 High Reliability MEMS North Seeker
Introduction
ER-MNS-18 is a MEMS north seeker with high cost-effectiveness and reliability. It is composed of a three-axis MEMS gyroscope and a three-axis MEMS accelerometer, and can measure true north. It features high precision, high reliability, and is resistant to harsh environments. It is designed to meet the application requirements of various markets.
Feature
Size:65*51*35.5
Weight:140
Triaxial MEMS gyro and accelerometer
5°C to 55°C temperature compensation
High performance heading accuracy up to 0.5°secψ(1σ)
Low power consumption and wide voltage
Resistant to harsh environment
Application
North seeking in logging tools/gyro tools
Pointing, steering and guiding in advanced mining/drilling equipment
Initial alignment
Direction pointing and tracking in satellite antenna, target tracking system
Guidance and navigation in navigation grade MEMS system
Precision platform attitude measuring and controls
Precision attitude measuring in navigation grade MEMS IMU/INS
North finding in land surveying
Petroleum exploration
Mining
Specification
| Model No. | ER-MNS-18AD | ER-MNS-18BD |
| Azimuth accuracy (1σ,°secψ) | 1 | 0.5 |
| Attitude accuracy(1σ,°) | ≤0.3 | |
| Azimuth accuracy retaining time | 20min | |
| Attitude accuracy retaining time | 20min | |
| Azimuth measurement range(°) | 0~360 | |
| Inclination angle measurement range(°) | -85~85 | |
| North seeking time | 180s | |
| North seeking method | stationary | |
| Update Rate (Hz) | 100 | |
| Environment and power | ||
| Operating temperature (℃) | 5~+55 | |
| Storage temperature (℃) | 0~+65 | |
| Power supply (V) | 6~12 DC | |
| Power (W, power supply 6V) | 2 | |
| Communication interface | RS-422 | |
| Physical characteristics | ||
| Size (mm×mm×mm) | 65*51*35.5 | |
| Weight (g) | 140g | |
Data protocols
Upper computer receiving protocol
The data update rate is 100Hz, the baud rate is 230400bps, and each frame contains 61 bytes of data, each byte contains 1 start bit (0), 8 data bits, 1 stop bit (1), and no parity. The specific data format is shown in the table below:
Table 1 Receive data frame format
| Bytes (60 bytes total) | Data content | supplementary note |
| 1~4 | header | EB8055AA |
| 5~8 | X Gyro Data | Low then high, dimensionless digital FLOAT |
| 9~12 | Y gyro data | Low then high, dimensionless digital FLOAT |
| 13~16 | Z Gyro Data | Low then high, dimensionless digital FLOAT |
| 17~20 | X ACCL data | Low then high, dimensionless digital FLOAT |
| 21~24 | Y ACCL data | Low then high, dimensionless digital FLOAT |
| 25~28 | Z ACCL data | Low then high, dimensionless digital FLOAT |
| 29~32 | Lon | Low then high, 0.000001°. |
| 33~36 | Lat | Low then high, 0.000001°. |
| 37~40 | Alt | First low, then high, 0.000001m |
| 41~44 | count | Low then high, 10ms |
| 45~46 | pit | Low then high, 0.01° |
| 47~48 | rol | Low then high, 0.01° |
| 49~50 | yaw | Low then high, 0.01° |
| 51~52 | North speed | First low then high, 0.01m/s |
| 53~54 | up speed | First low then high, 0.01m/s |
| 55~56 | east speed | First low then high, 0.01m/s |
| 57 | state | 0xA1 alignment, 0xB1 hold |
| 58 | end of frame | 0x00 |
| 59 | end of frame | 0xFF |
| 60 | end of frame | 0x34 |
| 61 | matching test | EB 80 and the sum of all bytes other than itself |
Host computer sending protocol
Total number of bytes sent down in a single transmission: 21 bytes, baud rate 230400bps, no parity, each byte includes: start bit (0), data bit (8 bits), stop bit (1).
- Priming
| byte symbol | define | note |
| 1 | 0xEB | |
| 2 | 0x80 | |
| 3 | 0x00 | |
| 4 | 0xCC | |
| 5-8 | 0x00 | |
| 9-12 | 0x00 | |
| 13-16 | 0x00 | |
| 17-21 | 0x00 |
- Send warp and woof height
| byte symbol | define | note |
| 1 | 0xEB | |
| 2 | 0x80 | |
| 3 | 0x00 | |
| 4 | 0xAA | |
| 5-8 | lon | |
| 9-12 | lat | |
| 13-16 | alt | |
| 17 | 0xAA | |
| 18 | 0xBB | |
| 19 | 0xCC | |
| 20 | 0xDD | |
| 21 | 5~20 heterodyne calibration |
Determine the definition of the data sent based on byte 4:
- if control_flag==0xCC: restart work
- if control_flag==0xAA: send latitude/longitude altitude
Send order: 5-8 bytes: latitude (*1e6 in °)
9-12 bytes: longitude (*1e6 in °)
13-16 bytes: height (*1 in m)
For example, the C code that sends the latitude/longitude instruction (the rest of the bytes are configured arbitrarily), Latitude is "latitude * 1e6", longitude is similar, and altitude scale is 1.
bytSend[0] = 0xeb;
bytSend[1] = 0x80;
bytSend[2] = 0x00;
bytSend[3] = 0xaa;
bytSend[4] = (Latitude>>24) & 0xff;
bytSend[5] = (Latitude>>16) & 0xff;
bytSend[6] = (Latitude>>8) & 0xff;
bytSend[7] = (Latitude) & 0xff.
bytSend[8] = (Longitude>>24) & 0xff;
bytSend[9] = (Longitude>>16) & 0xff;
bytSend[10] = (Longitude>>8) & 0xff;
bytSend[11] = (Longitude) & 0xff.
bytSend[12] = (Altitude>>24) & 0xff;
bytSend[13] = (Altitude>>16) & 0xff;
bytSend[14] = (Altitude>>8) & 0xff;
bytSend[15] = (Altitude) & 0xff;
bytSend[16] = 0xaa;
bytSend[17] = 0xbb;
bytSend[18] = 0xcc;
bytSend[19] = 0xdd;
bytSend[20] = b[4]^b[5]^... .b[19];
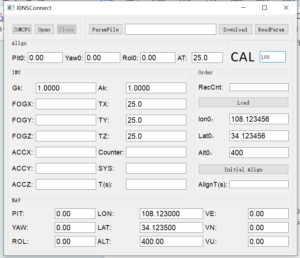
Introduction to the software
Click the COMCFG button to set the serial port, baud rate and frequency. The baud rate is 230400 and the frequency CAL is 100HZ.
Click Open to start the test.
Click Initial Align to start the north search, the search time is 300s.The result is displayed at PIT;YAW;ROL.
If you want to change the latitude and longitude, please change them at Lon0 and Lat0, then click Load, and then click Initial Align to re-navigate.
Please do not disassemble this product without our company's permission, if disassembled without permission, the warranty will be invalid.
If there is any technical problem or failure in the use of the product, you can contact the corresponding technical personnel of our company.
Application Techniques
1.Applicable to coal mines, tunnels, and exploration! North seeker's strength revealed
2.How important is the North Seeker in the field of oil、mining and drilling?
4.Efficient mining, north seeker assists mining drilling operations
5.Accurate orientation, easy to deal with! North seeker helps work more efficiently
More Products
 Ultra-small Size OEM MEMS North Seeker
Ultra-small Size OEM MEMS North Seeker Smallest Volume MEMS North Seeker
Smallest Volume MEMS North Seeker OEM MEMS North Seeker
OEM MEMS North Seeker High Performance North Seeking MEMS Gyroscope
High Performance North Seeking MEMS Gyroscope High Accuracy MEMS Accelerometer
High Accuracy MEMS Accelerometer Low Cost 3 Axis FOG North Seeker
Low Cost 3 Axis FOG North Seeker