

MEMS gyroscope is a new type of gyroscope based on MEMS technology. Different from the traditional mechanical gyroscope, MEMS gyroscope is chip-based. MEMS gyroscopes are also applicable to a wide range of fields. According to their functions, they can be divided into north-seeking gyroscopes and navigation gyroscopes. North-seeking gyroscopes are mainly used in ground navigation, such as oil logging, mining and other fields, while navigation gyros are more used in air and maritime navigation, such as aerospace, etc. This article will focus on the working principle of MEMS gyro, the north-seeking coordinate system and the north-seeking principle.
The working principle of MEMS gyroscopes
When an object with an initial angular velocity makes straight motion in a rotating coordinate system, its motion trajectory is a straight line. But for the inertial coordinate system, the movement trajectory of the object will deviate to a certain extent, because the moving object will be interfered by external force. This force is called Coriolis force, which is perpendicular to the direction of movement of the object. Therefore, MEMS gyroscopes use the Coriolis force to measure the angular rate of an object. Figure 1 illustrates the principle of the Coriolis force.
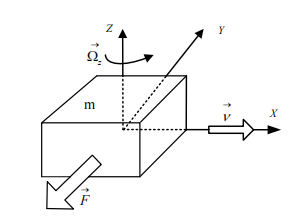
Figure 1 The principle of the Coriolis force
As can be seen from the figure above, the object m is moving uniformly along the X axis, its velocity is v, and the object m itself is rotating around the Z axis, its angular rate is Ωz. The following formula represents the Coriolis force on the object m:
![]()
Figure 2 The formula of the Coriolis force
MEMS gyroscope contains a vibrating block and a flexible spring inside. MEMS gyro (that is the object m in Figure 1) rotates around the Z-axis, and the vibrating block vibrates, so that the Coriolis force is generated. When the MEMS gyro starts to move, the capacitive detection sensor on the vibrating block will generate energy transfer, causing changes in the electrochemical quantity. It can be seen from Figure 3 that the mass blocks on both sides of the spring move around the Z-axis at the same time. They are both affected by the Coriolis force and the directions of their forces are opposite.
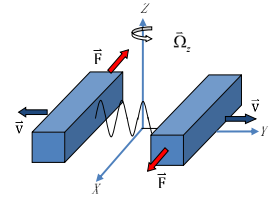
Figure 3 The vibrating structure of MEMS gyroscope
North-seeking coordinate system of MEMS gyroscope
Before understanding north seeking, we need to know the three common north directions: true north, magnetic north and coordinate north. True north refers to the tangential direction connecting the North and South Pole of the Earth, and the direction of true north is fixed. Magnetic north is the end point of all magnetic meridians in the direction of the Earth's magnetic force, and it changes with changes in the Earth's magnetic field. Coordinate north is a zonal projection of true north, which is consistent with true north only at the central meridian, and deviations in the meridian convergence angle will occur in other places. Figure 4 shows the relationship between these three north directions.
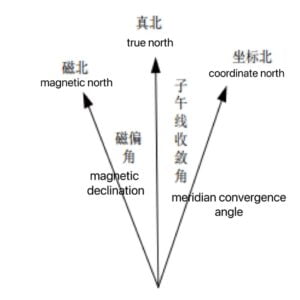
Figure 4 Three north directions and their relationships
MEMS gyro searches north through the carrier coordinate system. The carrier coordinate system has different forms of coordinate systems depending on the carrier. In the figure, we refer to it as the b system for short. The carrier coordinate system records the attitude information of the carrier. Figure 5 shows the carrier coordinate system. Xb, Yb, and Zb point to three different directions respectively. Through the carrier coordinate system, the carrier attitude in the three directions of pitch, roll and heading can be measured.
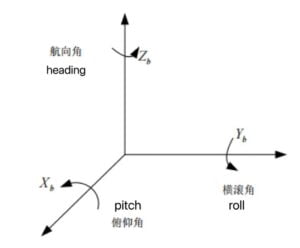
Figure 5 Carrier coordinate system and attitude angle
North-seeking principle of MEMS gyroscope
The north-seeking principle of a gyroscope is to measure the component of the earth's rotation angular rate in the horizontal plane through its sensitive axis, thereby obtaining the angle with true north. Ideally, the gyroscope's sensitive axis is parallel to the horizontal plane and points toward true north. At this time, the formula in Figure 6 represents its static output data:
![]()
Figure 6 North-seeking formula
Where Φ represents the local latitude, Ωa is the horizontal component of the Earth's angular rotation velocity, and θ is the initial north as shown in Figure 7.
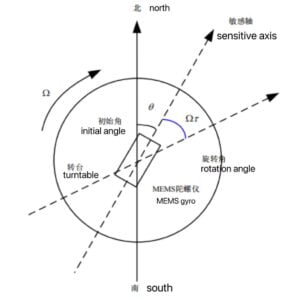
Figure 7 North direction angle
The north-seeking methods of MEMS gyroscopes can be divided into two-position north-seeking, four-position north-seeking, multi-position north-seeking and continuous rotation dynamic north-seeking.
The second position north seeking refers to placing the attitude instrument on a mechanical turntable, controlling the attitude instrument to be in two positions 180º apart through the turntable, and collecting the values of the gyro-sensitive earth angular rate component respectively. The gyro output of two positions 180º apart can offset the long-value drift through a solution method, and the time interval between the two positions should be controlled within a short period of time.
Four-position north seeking means to control the attitude instrument by rotating the turntable on the basis of two-position north seeking at four positions that are 90º apart, and collect the values of the gyro-sensitive earth angular rate components respectively. After collecting one position, move to the next position. The time should be as short as possible.
Multi-position north seeking is a north seeking solution that collects gyroscope output from multiple positions separated by angles while the gyroscope rotates 360º on the basis of two-position and four-position north seeking. Because more locations are collected, the accuracy of the gyroscope's sensitivity to the earth's rotation rate becomes correspondingly higher, and the north-finding accuracy is also higher.
Continuous rotation dynamic north seeking refers to placing the gyroscope on a precision turntable and driving the sensitive axis of the gyroscope to rotate at a constant speed. The rate of rotation is artificially controlled through the turntable. At the same time, the output of MEMS gyro during rotation is collected to calculate the northward angle. Compared with static north seeking, continuous rotation is less affected by noise and constant drift, and can achieve higher-precision north seeking in a shorter time.
Based on the working principle and north-seeking principle of MEMS gyroscopes, Ericco has developed a specialized north-seeking MEMS gyroscope ER-MG2-50/100. It can be used for pointing, steering and guidance in mining/drilling equipment, precision attitude and position measurement in navigation-grade MEMS IMU/INS, north-seeking positioning in geodetic/land mobile mapping systems, oil exploration, etc. Its accuracy level can reach 0.01-0.02°/hr bias instability and 0.0025-0.005°/√hr angular random walk.
Different north-finding methods have their own strength and weakness. Based on the above introduction to the four north-finding methods, what are the advantages and disadvantages of these four north-finding methods? The table below compares them.
| North seeking method | Advantages | Disadvantages |
| The second position north seeking | Few samples, short time, simple solution | Need to use latitude information, easily affected by the initial angle |
| Four-position north seeking | The solution is simple and does not require latitude information when horizontal | It takes a long time and requires high indexing accuracy at each position, which is affected by the initial angle. |
| Multi-position north seeking | The solution is more complicated and does not require latitude information when horizontal | There are many sampling points and a long time, which is easily affected by transposition errors. |
| Continuous rotation dynamic north seeking | Gyro drift is eliminated after adjustment, and the theoretical accuracy is high | The accuracy will be affected by the stability of the turntable rotation speed, the rotation speed, and the gyro sampling frequency. |
Through this article, I hope you can have the most basic understanding of the working principle of MEMS gyroscopes, the north-seeking coordinate system and the north-seeking principle. If you are interested in MEMS gyro related products and knowledge, please click on the related products and related links below.
More Technical Questions
1.The materials and structure of MEMS gyroscope
2.What’s the advantages and disadvantages of MEMS gyroscope?
3.How to select MEMS gyroscope?
4.MEMS gyroscope VS FOG: What’s the difference between them?
5.A Downhole Multiphysics Measuring Device Based On MEMS Gyroscope-1
6.MEMS gyroscope: A downhole multiphysics measuring device-2
Products in Article
.jpg)



