


{kind=link}
{kind=link}
ER-MIMU-103 Stable Control MEMS IMU
Introduction
IMU is an abbreviation for Inertial Measurement Unit, which mainly consists of a three-axis gyroscope and a three-axis accelerometer. It can measure the angular velocity and linear acceleration of an object in real time, autonomously sensing motion without relying on satellites or external signals, and calculating attitude, tilt angle, heading, and trajectory through integrated algorithms.
Features
Three-axis digital gyroscope:
Dynamic measurement range: ±400º/s;
Bias instability: 0.1 º/h (Allan variance);
Angle random walk: 0.05º/√h.
Three-axis digital accelerometer:
Dynamic measurement range:±30g;
Bias instability: 10ug (Allan variance);
Ensure accuracy over the full temperature range (-40°C~80°C): Built-in high-performance temperature calibration and compensation algorithm;
Communication interface: 1 SPI
Simple and cost-effective integration
Application
Drone heading, pitch, roll measurements
Control and orientation in robots and driverless vehicles
Guidance, navigation and control in tactical MEMS system
Stabilizing and pointing in the satellite dish, target tracking system
High-speed rail track monitoring and maintenance
Ship attitude measurement and maintenance, channel detection and maintenance
Forests, land monitoring, etc
Specifications
| ER-MIMU-103 | |||
| Parameter | Test condition | ER-MIMU-103 | Unit |
| Gyroscope | |||
| Measuring range | ±400 | º/s | |
| Bias instability | Allan variance | <0.3 | º/h |
| Bias stability | 10s,1δ | <3 | º/h |
| Bias stability | 1s,1δ | <9 | º/h |
| Random Walk | 1б | <0.125 | º/√h |
| Bias Repeatability | 1б | <3 | º/h |
| Scale factor at 25°C | 16000 | LSB/º/s | |
| Scale factor non-linearity | <300 | ppm | |
| Bandwidth(3dB) | 250 | Hz | |
| Accelerometer | |||
| Measuring range | ±30 | g | |
| Bias instability | Allan variance | 20 | ug |
| Bias stability | 10s smoothing,1σ | <75 | ug |
| Bias temperature coefficient | <50 | ug/℃ | |
| Bias temperature hysteresis | <1 | mg | |
| Bias month repeatability | 1σ | 100 | ug |
| Scale factor non-linearity | <3000 | ppm | |
| Scale factor month repeatability | <30 | ppm | |
| Bandwidth | 200 | Hz | |
| Magnetometer | |||
| Dynamic measurement range | ±2.5 | Gauss | |
| Resolution | 120 | uGauss | |
| Noise Density | 50 | uGauss | |
| Bandwidth | 200 | Hz | |
| Barometer | |||
| Pressure range | 450~1100 | mbar | |
| Overall error | 6 | mbar | |
| Resolution | 0.1 | mbar | |
| Absolute measurement accuracy | 1.5 | mbar | |
| Long-term stability | ±1 | mbar/yr | |
| Communication Interface | |||
| 1 way SPI | Baud rate | <15 | MHz |
| Electrical specification | |||
| Voltage | 6~12 | V | |
| Power dissipation | 2 | W | |
| Structural characteristics | |||
| Dimension | 47×44×14mm | ||
| Weight | 40 | g | |
| Operating environment | |||
| Operating temperature | -40~80 | ℃ | |
| Storage temperature | -45~85 | ℃ | |
Dimension

Product composition and working principle
The products are mainly composed of three-axis MEMS accelerometer, gyroscope, three-axis magnetic sensor and barometric pressure sensor. Its working principle is as follows: the ARM microcontroller is used to collect gyroscope, accelerometer, magnetometer and barometer data, of which three high-precision gyroscopes are collected with one digital interface SPI, and three accelerometers are collected with another one digital interface SPI. All sensors are acquired and calibrated and compensated in the software.
Product technical characteristics
a)The product is designed for miniaturization and low power consumption;
b)Products with wide voltage design.
Electrical interface
The MIMU inertial measurement unit uses MW12-03-G-D-130-112 output externally, and the mating connector is Samtec CLM-112-02-L-D. The electrical pin definitions are shown in Table 1.Table 1 Pin definition of MIMU high precision inertial measurement unit
| Pin serial number | name | type | description |
| 10,11,12 | VDD | power supply | |
| 13,14,15 | GND | Power Ground | |
| 7 | DIO1 | I/O | Generic I/O, configurable |
| 9 | DIO2 | I/O | |
| 1 | DIO3 | I/O | |
| 2 | DIO4 | I/O | |
| 3 | SPI-CLK | input | The SPI defaults to slave mode |
| 4 | SPI-MISO | output | |
| 5 | SPI-MOSI | input | |
| 6 | SPI-CS | input | |
| 8 | RST | input | reposition |
| 16~24 | NC | spare | Manufacturer reserved |
Communication protocol
Data output protocol
| R/W | PAGE_ID | address | default | Register description |
| R/W | 0x00 | 0x00 | 0x00 | Page identifier |
| R | 0x00 | 0x0E | N/A | temperature |
| R | 0x00 | 0x10 | N/A | x axis gyroscope output, low word |
| R | 0x00 | 0x12 | N/A | x axis gyroscope output,high word |
| R | 0x00 | 0x14 | N/A | y axis gyroscope output, low word |
| R | 0x00 | 0x16 | N/A | y axis gyroscope output,high word |
| R | 0x00 | 0x18 | N/A | z axis gyroscope output, low word |
| R | 0x00 | 0x1A | N/A | z axis gyroscope output,high word |
| R | 0x00 | 0x1C | N/A | x axis accelerometer output, low word |
| R | 0x00 | 0x1E | N/A | x axis accelerometer output,high word |
| R | 0x00 | 0x20 | N/A | y axis accelerometer output, low word |
| R | 0x00 | 0x22 | N/A | y axis accelerometer output,high word |
| R | 0x00 | 0x24 | N/A | z axis accelerometer output, low word |
| R | 0x00 | 0x26 | N/A | z axis accelerometer output,high word |
| R | 0x00 | 0x28 | N/A | x axis Magnetic output,high word |
| R | 0x00 | 0x2A | N/A | y axis Magnetic output,high word |
| R | 0x00 | 0x2C | N/A | z axis Magnetic output,high word |
| R | 0x00 | 0x2E | N/A | Barometric pressure output,low word |
| R | 0x00 | 0x30 | N/A | Barometric pressure output,high word |
| X axis gyroscope for example | X_GYRO_OUT | X_GYRO_LOW |
| 1LSB=0.02°/S | The weight of the MSB is 0.01°/s, and the weight of the successors is half that of the previous one | |
| 0.02*X_GYRO_OUT | 0.01*MSB+0.005*....... |
YZ gyroscopes are calculated in a similar way to X-axis gyroscopes。
| X axis accelerometer for example | X_ACCL_OUT | X_ACCL_LOW |
| 1LSB=0.8mg | The weight of the MSB is 0.4mg, and the weight of the successors is half that of the previous one | |
| 0.8*X_ACCL_OUT | 0.4*MSB+0.2*....... |
YZ accelerometers are calculated in a similar way to X-axis accelerometers。
| X x axis Magnetic | X_MAGN_OUT |
| 1LSB=0.1mGauss | |
| 0.1*X_MAGN_OUT |
YZ axis magnetometers are calculated in a similar way to X-axis magnetometers。
| Example of barometric pressure calculation | BAROM_OUT | BAROM_LOW |
| 1LSB=40ubar | The MSB is weighted at 20ubar, and the successors are weighted half the weight of the previous one | |
| 40*BAROM_OUT | 20*MSB+10*....... |
Note: For gyroscope, accelerometer, magnetic fraction high 16bit, and low 16bit, the final result of addition is calculated separately
Test interface operation description
The user installs the test interface on the computer, open xInsConnect.exe,as shown below.
Click "COMCFG" to configure the baud rate, which is the COM port required; Click the "Open" button power on the IMU.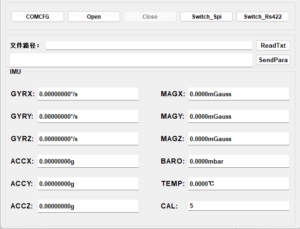
Precautions for use
1 )Installation error description
Internal orthogonal compensation has been carried out for the whole product. If the platform used by the product cannot guarantee the accuracy of the benchmark after installation, please compensate the installation error accordingly.
2 )Installation and protection
When the product is installed, it should be tightly installed parallel to the base level of the carrier installation (the installation error with the base level should be less than 0.05°).
Because the product is a precision test instrument, although there is a shell protection, in order to protect the product damage, users should handle gently. The use and movement of the product should avoid falling, and be sure not to let the product and other components in the use of serious impact, to ensure the accuracy of the product datum requirements.After sale
If there is any technical problem or failure in the use of the product, you can contact the corresponding technical personnel of our company.
Application Techniques
1.Do you know the core components that give precise control to automated equipment
2.High-performance IMU: A New Benchmark for Precise Measurement and Control
3.Industrial Versatile Tool: High Cost-Performance IMU Meets Diverse Needs
4.Flight safety secrets: The core role of high-precision IMUs in aviation
5.Revolutionizing drone navigation: How to redefine high performance and low cost
6.From flight control to fault diagnosis, how does IMU dominate drones?
More Products
 North-Seeking MEMS IMU
North-Seeking MEMS IMU High Accuracy North-Seeking MEMS IMU
High Accuracy North-Seeking MEMS IMU North Seeking Mems Imu For Gyro Tools
North Seeking Mems Imu For Gyro Tools North-seeking MEMS IMU
North-seeking MEMS IMU
 Economical MEMS Gyroscope
Economical MEMS Gyroscope