Precision agriculture is a based on space information management and modern farming management strategy of variation analysis and operation technique system, in brief, it is the rationalization of input and maximization of output benefit. Precision farming can improve crop yields and mitigate environmental impacts by effectively managing spatial variation in agricultural production.Key applications of GNSS in precision farming include: tractor navigation, automated driving, variable operations, yield monitoring, biomass monitoring, soil condition monitoring, livestock tracking, agro-logistics applications, farm machinery monitoring and asset management, geo-traceability, and farmland mapping.
Precision agricultural improve the agricultural reality productivity with high limit, and achieve sustainable agricultural development with high quantity, high output, low consumption, and environmental protection. This article will present an overview of international GNSS precision agriculture applications and introduce specific applications of GNSS in precision agriculture.
1. International status and application trends
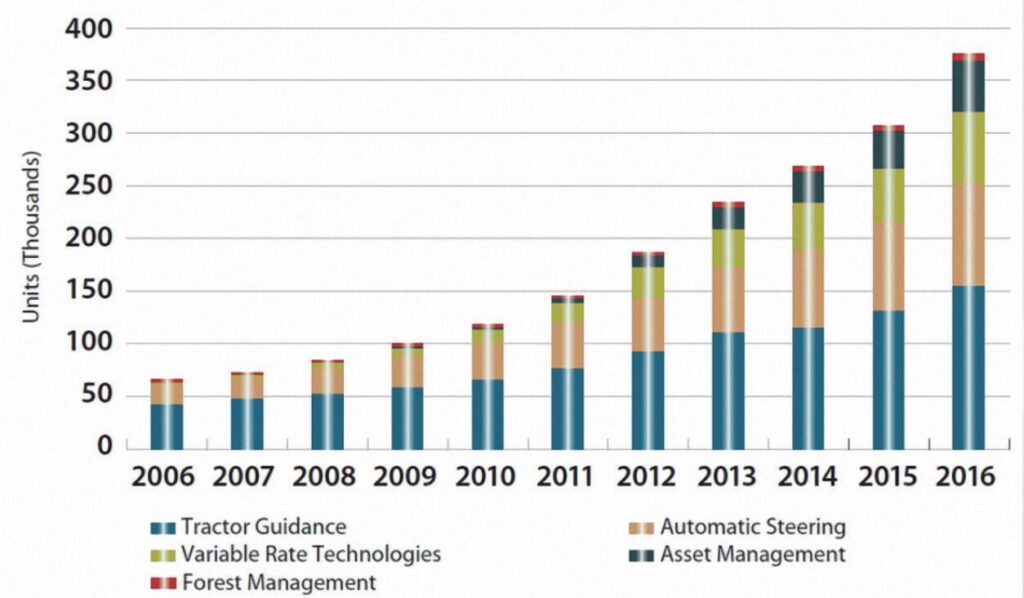
As shown in Fig. 1, from 2006 to 2016, tractor navigation has been the most widely used application, accounting for 41% of total shipments, with more than 700,000 units installed in 2016. Autonomous driving had the second highest annual shipments, growing at a higher rate than tractor navigation. Variable operations growth has been high, reaching 67,000 units shipped in 2016. Installations of asset management solutions have increased annually since 2006, reaching 153,000 units in 2016.
2.Specific applications in precision agriculture
2.1 Autonomous Driving
GNSS plays a crucial role in the development and operation of autonomous vehicles and machinery in agriculture. Tractors, drones, and other farm equipment equipped with GNSS receivers can navigate fields with high precision, following predefined paths. This not only enhances operational efficiency but also reduces overlap in field operations, minimizing resource wastage.
A recent study in the "Journal of Agricultural Science and Technology" (2023) showcased the use of GNSS-guided autonomous tractors in precision planting. The study reported increased planting accuracy, reduced fuel consumption, and enhanced overall efficiency, highlighting the potential of GNSS in automating various agricultural tasks.
2.2 Precision Field Mapping
One of the fundamental applications of GNSS in precision farming is precision field mapping. High-precision GPS receivers enable farmers to precisely map their fields, creating accurate geospatial data layers. This data can include information such as soil types, topography, and variability in crop health. By overlaying this information with historical yield data, farmers can make informed decisions about planting patterns, nutrient application, and irrigation.
A study published in the "Journal of Applied Remote Sensing" (2022) used GNSS-based precision mapping to analyze the spatial variability of soil properties. The researchers found that integrating GNSS data with soil information significantly improved the accuracy of soil property maps, allowing for more precise management of nutrients and irrigation.
2.3 GNSS RTK Technology Used in Precision Agriculture
RTK is widely used in tractor and autonomous harvester to enhance farm machinery control and maintain precise spacing between neighboring operations. More specifically, RTK provides the required accuracy wherever farm machinery and operation calibration is critical for subsequent field operations.
A typical example is a strip-till operation, where seeding is done to ensure that the seed is placed in the center of each plot. If the operation is done near the edge of the plot or outside the plot, crop yield will be affected. Therefore, RTK centimeter-level accuracy is necessary to maintain accurate alignment for each operation. RTK also allows to minimize harvesting losses. RTK technology is used to more accurately guide fertilizer applicators to crop rows to maximize nutrient uptake while reducing the environmental risk of off-site fertilizer runoff.
Equipped with high precision RTK algorithm engine, ER-GNSS-M02 module is widely used in precision agriculture. Designed as a high precision integrated navigation positioning module, it also supports supports the multi-frequency signal reception of the whole constellation. What's crucial is its built-in Inertial Measurement Unit (IMU) employing a tight combination algorithm. This feature allows the module to consistently produce stable and reliable navigation and positioning data, even in regions where satellite signals face significant disruptions.
Conclusion
The convergence of GNSS in farming has transformed traditional farming practices, providing farmers with unprecedented accuracy and efficiency. By understanding international GNSS in farming applications, we can provide lessons for our own countries to use satellite terminals to develop agriculture and build a comprehensive precision agriculture technology equipment and service system.
From precise field mapping to autonomous mechanical operations, GNSS continues to drive innovations that increase crop yields, reduce environmental impacts and contribute to sustainable agriculture. As technology continues to advance, the combination of GNSS with other emerging technologies is expected to further revolutionize the landscape of precision agriculture and ensure a more efficient and sustainable future for global food production.
I will appreciate it if you find this article helps you a lot. For more information, read the articles and products below or feel free to contact us: info@ericcointernational.com
More Technical Questions
1. Decoding Navigation Technology: GNSS Boards vs. GNSS Modules – Unveiling the Distinctions
2. Equipment Used in GNSS: Navigating Precision and Accuracy
3. How to select a GNSS antenna?
5. The Difference and Connection between GPS and GNSS
6. Scientific Farming, With The Help of GNSS
Products in Article