{kind=link}
{kind=link}
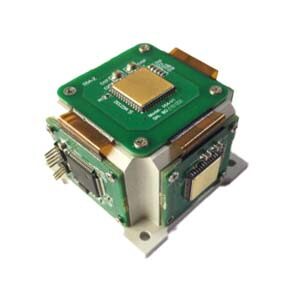
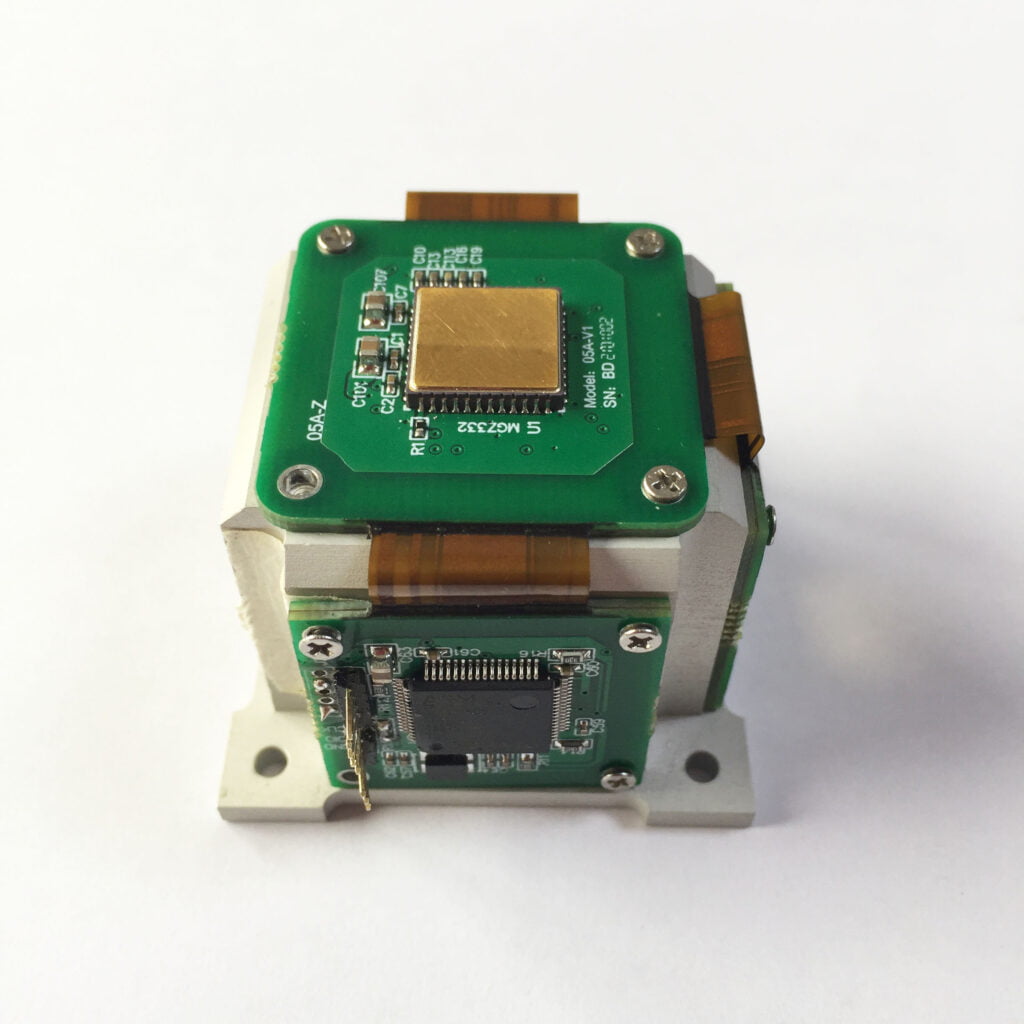
Features
-40 degrees Celsius to 60 degrees Celsius, full temperature calibration;
2KHz high sampling rate, 2KHz compensation operation;
The range and bandwidth of the sensor can be customized according to the needs.
Performance indicators
1.Inertial device accuracy specifications:
| Gyroscope | |
| Range | ±500°/s, ±1000°/s, ±2000°/s |
| Zero position | < 36°/h |
| Bias stability | Static test at room temperature, gyro second mean data smooth in 10 seconds, standard deviation ≤3°/h. |
| Bias repeatability | At room temperature, bias data was measured seven times repeatedly. The standard deviation of the seven bias ≤3°/h. |
| Bandwidth | 100Hz |
| Accelerometer | |
| Range | ±6g,±12g,±24g |
| Zero position | <1mg |
| Bias stability | Static test at room temperature, second mean data, standard deviation ≤50ug. |
| Bias repeatability | At room temperature, bias data was measured seven times repeatedly. The standard deviation of the seven bias≤50ug |
| Bandwidth | 100Hz |
2.Electrical parameters
| Operating voltage | 3.4V~3.8V DC |
| Power ripple | <50mV |
| Maximum power consumption | <900mW |
| Operating temperature | -40℃~+85℃ |
| Storage temperature | -50℃~+100℃ |
3.Dimension:44mm*47mm*9.2mm
4.Weight: 30g
External interfaces

| Pin number | Pin name | Type | Description |
| 10, 11, 12 | VDD | Power supply | Voltage: 3.5V~3.8V,Current: 300mA |
| 13, 14, 15 | GND | Power supply | |
| 3 | SPI-CLK | Input/Output | SPI, The master-slave mode is configurable, default is the slave mode |
| 4 | SPI-MISO | Input/Output | |
| 5 | SPI-MOSI | Input/Output | |
| 6 | SPI-NCS | Input/Output | |
| 19 | UART1-TXD | Output | UART, The baud rate is configurable, default is 921600bps |
| 21 | UART1-RXD | Input | |
| 16 | UART2-TXD | Output | UART, The baud rate is configurable, default is 921600bps |
| 17 | UART2-RXD | Input | |
| 22 | UART3-TXD | Output | UART, The baud rate is configurable, default is 921600bps |
| 24 | UART3-RXD | Input | |
| Others | NC | standby | Manufacturer reserved |
Data Protocols:
Three-way serial port baud rate is 921600bps, 8 data bits, one stop bit, no parity, send low byte first, then send high byte, low bit of each byte is sent first. The default data update rate is 1KHz, the highest support 2KHz.
| Byte number | Formats | Content | Unit | Resolution | Description |
| 1 | Unsigned Char | 0x55 | - | - | Frame header |
| 2 | Unsigned Char | 0xAA | - | - | Frame header |
| 3~6 | Unsigned | - | ms | 1 | Power-on time count |
| 7~10 | Float | - | °/s | - | X gyro angular rate |
| 11~14 | Float | - | °/s | - | Y gyro angular rate |
| 15~18 | Float | - | °/s | - | Z gyro angular rate |
| 19~22 | Float | - | m/s² | - | X acceleration |
| 23~26 | Float | - | m/s² | - | Y acceleration |
| 27~30 | Float | - | m/s² | - | Z acceleration |
| 31~34 | Float | - | ° | - | Temperature |
| 35 | Unsigned Char | - | - | - | Different-sum check, including 1~34 bytes. |
| 36 | Unsigned Char | - | - | - | Summation checksum, including 1~35 bytes. |
The SPI interface supports master mode and slave mode, and the default data protocol is the same as above.
Dimension

More Technical Questions
1.Application of IMU in the Field of Drones
3.What is the Difference Between IMU and AHRS?
6.What Does IMU Mean for A Drone?
Products in Article